




Introduction
While Zaber offers a wide variety of hardware solutions to fit many types of motion and different application requirements, there are also many situations where it may be useful to have a Zaber controller operate a third-party instrument so that it can take advantage of the easy to use X-series control interface and software options. Zaber Launcher‘s Advanced Hardware Setup app is available for this, and it allows you to configure a Zaber controller to work with any third party instrument that uses a 2-phase stepper motor. An additional use for this application is to use Zaber’s new controllers with older Zaber peripheral models, which may not have an existing configuration. If you are adding hardware, such as a third-party limit sensor or encoder, to a new Zaber peripheral then this is also the right tool for configuring the right settings.
Setup
To demonstrate the steps for using the app, we will be using the Zaber X-MCC motion controller. We will show how to configure an older Zaber LST0500B-E01T3 peripheral model. This legacy model features a home sensor and a motor mounted encoder.
Connect Hardware
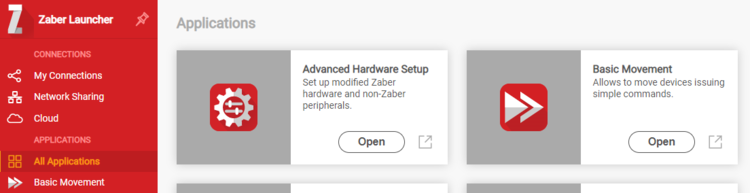
First, connect the instrument to the controller, including the motor leads, encoder, and limit sensors. The X-MCC uses a 26 pin connector with the pinout described here. For this example, the MC10T3 cable ensures compatible connection. Contact Zaber support if you have any questions. Once connected, start Zaber Launcher, open the connection with the X-MCC, and go to the Advanced Hardware Setup application from the list of All applications.
Configure Axis
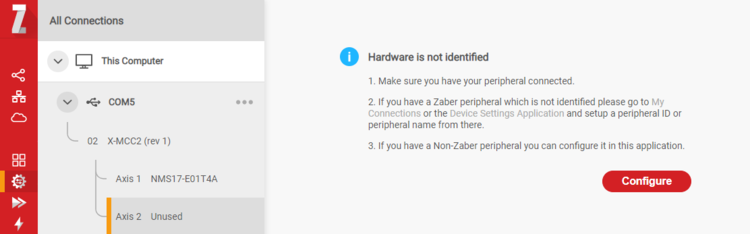
Next, select the axis for the new instrument you have connected and click “Configure”.
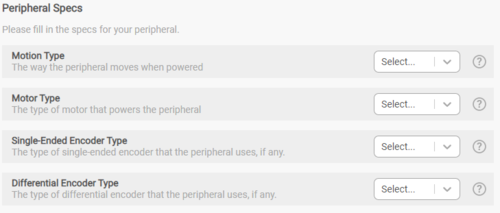
You will be prompted to select the type of motion (linear or angular), the type of motor (currently only stepper is supported), and the presence and type of any encoders (single-ended TTL or differential RS-422, and motor mounted or direct reading). Based on these selections Zaber Launcher will assign a peripheral ID to the axis as a starting point for that hardware configuration.
The LST0500B-E01T3 is a linear stage, so has linear motion. The encoder is a single-ended motor-mounted encoder. Based on these, the peripheral ID will be assigned with the name CLS-ET, which is for a customer’s stepper motor peripheral that moves linearly and includes a single-ended motor encoder.
Choose Settings
Once the general configuration of the connected instrument is specified, the next step is to provide more detailed information so that the controller knows how much current to use, what current control parameters will offer good performance, and what to do with the encoder and limit sensor signals.
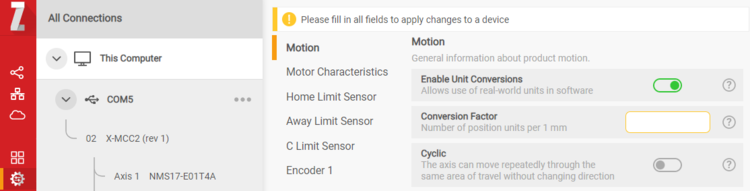
Motion Settings
First, input information about the instrument being controlled. If you know the number of position units per millimetre of movement of the instrument, you can specify the Conversion Factor. It is optional but it allows the Zaber Launcher and Zaber Motion Library to use practical units of length instead of position units. You can also set what speed you would like the movement to target and what acceleration to use, and whether the motion is cyclic or not (more common in rotary devices).
The LST0500B-E01T3 lists a resolution of 0.49609375 µm, so there would be 2015.748 position units in one millimetre. The listed maximum speed is 100 mm/s, so the speed target should be less than this value.
Motor Settings
Most motor parameters should be available from the supplier’s specification page, such as rated motor current per phase, resistance per phase, inductance per phase, and holding torque. A slider allows you to set whether you want the motor to use the full current while moving the motor, and what current to use while holding position. These can be set below the rated values if you want the motor to run cooler. You must also specify which direction the motor should consider positive (this may require you to guess and adjust later).
For our example, the LST0500B-E01T3 model lists a 2100 mA/phase rated motor current and 6.4 mH/phase motor inductance. The motor resistance and holding torque values are not listed online; if you find any information is missing from the datasheet that you need for setting up the instrument, contact the instrument manufacturer to request it. In this case, the resistance is 1 Ω/phase and the holding torque is 1.35 N-m.
Limit Settings
If a home and/or away sensor is connected you can set the traits like whether they are active low or active high, and which edge of the signal to reference to. Here you can also specify the maximum and minimum travel limits. For a rotary device, Zaber’s controller does not allow infinite rotation, but you can specify a very large positive and negative movement range covering many revolutions.
In our example, we would set the minimum limit to 0, and the maximum to 500 mm (the travel range of the LST0500B-E01T3). It has a home sensor that is active low and no away sensor, and we would set it to reference to the positive edge of the home sensor.
Encoder Settings
Finally, if you are configuring an instrument with an encoder, specify the characteristics of it. The most important one is the ratio of full motor steps per encoder count. Specify this as a multiplier and divisor. For example, the LST0500B-E01T3 model has a motor mounted encoder with 2000 states per revolution and a stepper motor with 200 steps per revolution so you can enter 200 as the multiplier and 2000 as the divisor. Since the ratio here is 1:10, you could also enter 1 as the multiplier and 10 as the divisor and it would work equally well. Note that Zaber uses 4X encoding for the quadrature encoder signal, meaning there are 4 states per quadrature cycle of the encoder. If the encoder specifies 200 CPR for example, this would mean 800 states per revolution.
A default filter setting for the encoder is suggested. If you are observing erratic encoder behaviour, contact Zaber to discuss whether changing this setting may be appropriate.
Test & Troubleshoot
Once you have applied the settings, try moving the device using the basic movement tab. If the motor makes a buzzing noise or does not run smoothly, some settings likely need to be changed. This will not harm the motor, but the settings must be corrected before continuing. The troubleshooting guide at the bottom of the app provides suggestions of which settings to check and adjust to resolve different symptoms.
Saving the State
To save time, you can save the initial state of the device after setup is complete. To do this, click on the • • • button on the bottom right of the app and selecting “Save/Load State”. You can use this to save the device state as a file on your computer, which you can then use to restore the axis back to that state (or set an axis on another controller to that state).
Resetting the Axis
If you want to connect a different peripheral to the controller, the settings on that axis can be cleared by clicking the • • • button on the bottom right of the app and selecting “Edit Peripheral Specs”. This will clear the settings and return to the first step in the app. Setting the Peripheral ID to 0 in the Setting tab will clear all device settings associated with that axis.